
ربات صنعتی چیست؟
ربات صنعتی در واقع یک سیستم اتوماتیک است که برای انجام مراحل مختلف فرآیند تولید محصول در انواع صنایع استفاده میشود. اغلب این ربات ها به طور کامل قابل برنامه ریزی هستند و سرعت و دقت انجام کار را به طور چشم گیری افزایش میدهند.
ربات های صنعتی در ابعاد مختلف تولید میشوند از نانو و میکرو گرفته تا ابعاد بزرگتر و کارخانه ای و قابلیت اضافه شدن به خط تولید را دارند. در ادامه شاخص های فنی ربات های صنعتی را توضیح میدهیم.
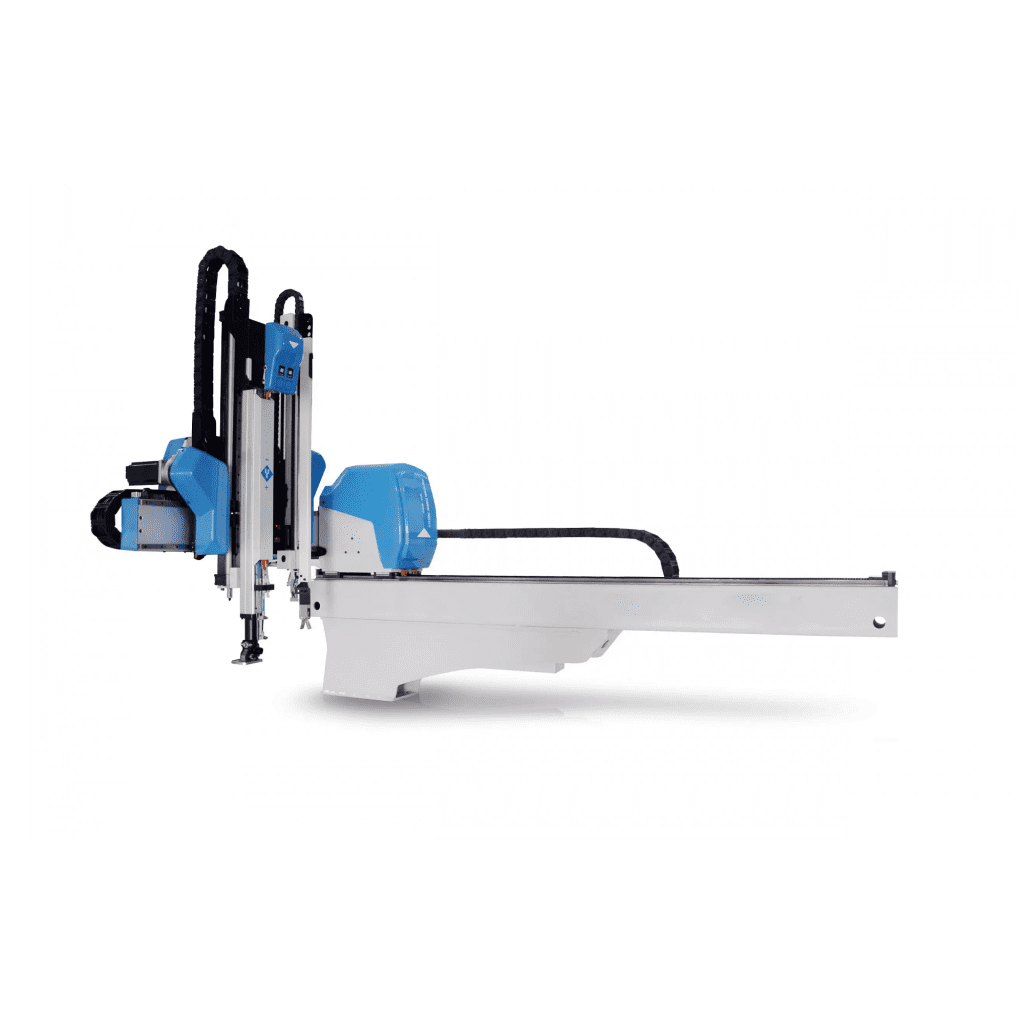
امروزه با گسترش تکنولوژی و نیاز تولیدکنندگان به بهینه سازی فرآیند تولید، استفاده از ربات های صنعتی در تولید قطعات پلاستیکی به روش تزریق بسیار متداول شده است. از این ربات ها در اصطلاح (Pick-and-place) به منظور قرار دادن قطعات ( اینسرت، لیبل و … ) درون قالب و یا برداشتن محصول و قرار دادن آن بر روی کانوایر استفاده می شود.
در تولید محصولات با ابعاد و اندازه های دقیق با پلیمرهای حساس به ضربه (که پران به روش سنتی ممکن است منجر به تغییر شکل و تغییر ابعادی محصول شود) به کارگیری ربات ها برای برداشتن محصولات از روی قالب به تولید کنندگان مزایایی نسبت به دیگر رقبا میدهد تا بتوانند کیفیت و سرعت تولید محصول را به طور چشمگیری افزایش دهند.
طبق تعربف انجمن رباتیک صنعتی (Robotic Industrial Association (RIA)) ربات صنعتی یک دستگاه مکانیکی قابل برنامه ریزی است که به جای یک نیروی انسانی کارهای تکراری و خطرناک با دقت بسیار بالا را انجام میدهد. همچنین طبق تعربف دیگری که از جانب انجمن بین المللی رباتیک (IFR) ارائه گردیده است، ربات صنعتی رباتی است که به صورت اتوماتیک کنترل میشود، قابل برنامه ریزی مجدد و چند منظوره می باشد و همچنین قابلیت برنامه ریزی در سه تا هفت محور را دارد.
این گونه رباتها اغلب در صنعت و تولید انبوه کاربرد دارند.
ربات صنعتی یک سیستم رباتیک است که برای ساخت و تولید انواع محصولات استفاده میشود. رباتهای صنعتی مورد استفاده در کسب و کارهای امروزی به صورت خودکار، برنامهریزی میشوند و قادر به حرکت در سه یا چند محور هستند. کاربردهای معمول رباتها شامل جوشکاری، نقاشی، مونتاژ، جداسازی قطعات، مکانیابی برای ساخت بردهای مدار چاپی، بسته بندی و برچسب زدن، پالتسازی، بازرسی محصول، آزمایش و… است.
رایجترین انواع ربات ها برای اتوماسیون صنعتی، شامل ربات های مفصلی، ربات های SCARA و رباتهای دکارتی است. با توجه به پیشرفتهای سریع فناوری در رباتیک و اتوماسیون، بخش تولید شاهد افزایش طراحی و توسعه رباتیک در فرآیندهای تولید خود بوده است. از ربات های صنعتی برای انجام وظایف با دقت و تکرار بالا استفاده میشود که منجر به تولید محصولاتی با کیفیت بالاتر میشود. توانایی ربات های صنعتی برای کار مداوم و بدون استراحت به تولیدکنندگان در افزایش بازده کمک میکند.
علاوه بر این، ربات ها میتوانند در محیط های خطرناک و زیانآور برای انسان کار کنند؛، بنابراین شرایط کار و ایمنی کارخانههای تولیدی را بهبود میبخشند. مزیتهای استفاده از ربات های صنعتی در کسب و کارهای امروزی، تولیدکنندگان را ترغیب میکند تا انواع مختلف رباتهای صنعتی را در خط تولید به کار گیرند تا کارایی و سودآوری را افزایش دهند.
انواع ربات های صنعتی
بر اساس پیکربندی مکانیکی، مکانیزم های رباتیک صنعتی را میتوان به شش نوع اصلی طبقهبندی کرد: ربات های مفصلی، ربات های دکارتی، ربات های SCARA ، ربات های دلتا، ربات های قطبی و ربات های استوانهای. جدا از پیکربندی مکانیکی، ربات های صنعتی را میتوان بر اساس کنترل حرکت، کنترل منبع تغذیه و خصوصیات بدنی نیز طبقهبندی کرد. در اینجا انواع عمده رباتهای صنعتی بر اساس پیکربندی، مزایا و معایب آنها و زمینههای کاربردی مورد بررسی قرار خواهد گرفت.
ربات های مفصلی
ربات مفصلی یکی از انواع متداول رباتهای صنعتی است که در پیکربندی مکانیکی خود مانند بازوی انسان عمل میکند. بازو با اتصال مفصل به پایه وصل میشود. تعداد اتصالات چرخشی که پیوندها را در بازو به هم وصل میکند معمولا از دو تا ده مفصل میتواند باشد و هر مفصل یک درجه آزادی برای ربات ایجاد میکند. اتصالات میتوانند موازی یا متعامد باشند. رباتهای مفصلی دارای شش درجه آزادی از رایجترین رباتهای صنعتی هستند زیرا این طرح انعطافپذیری بهینهای را ارائه میدهد.

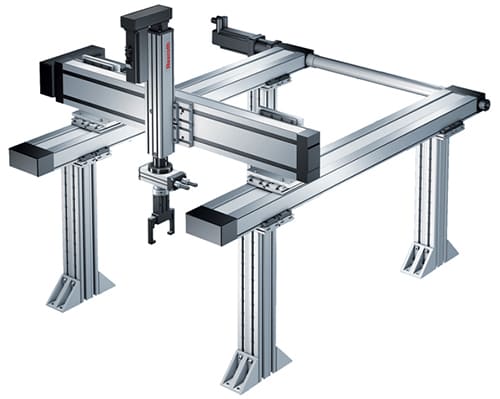
ربات های دکارتی
رباتهای دکارتی یا کارتزین از پیکربندی مستطیل شکل برخوردار هستند. این نوع ربات های صنعتی دارای سه اتصال پریزماتیک (prismatic) برای حرکت خطی در راستای سه محور عمود بر هم (Y,Xو Z) هستند. این نوع ربات همچنین ممکن است یک مفصل دورانی در end-effector داشته باشد تا حرکت چرخشی را انجام دهد. ربات های دکارتی در بیشتر کاربردهای صنعتی مورد استفاده قرار می گیرند زیرا انعطافپذیری را در پیکربندی خود ارائه می دهند که کاربرد آنها را برای نیازهای خاص مناسب میسازد.
ربات های اسکارا
ربات های SCARA دارای دو درجه آزادی دورانی است که نسبت به هم موازیاند. درجه آزادی سوم نیز معمولا به صورت پریزماتیک یا دورانی است. شفت های چرخشی به صورت عمودی قرار گرفتهاند و end-effector به انتهای بازو متصل است. ربات های SCARA برای حرکتهای صفحهای بسیار مناسباند و بیشتر برای کاربردهای مونتاژ استفاده می شوند. ربات های SCARA می توانند سریعتر حرکت کنند و ساختار سادهتری نسبت به ربات های استوانهای و دکارتی دارند.

ربات های دلتا
ربات های دلتا نوعی از رباتهای موازی به حساب میروند زیرا در آنها چند لینک به صورت موازی به یک پایه مشترک متصل شدهاند. با توجه به تاثیر مستقیم هر مفصل بر روی نقطه اثر انتهایی، می توان موقعیت اثرگذار را به راحتی با بازوهای آن کنترل کرد که منجر به کار با سرعت زیاد می شود. ربات های دلتا دارای یک فضای کاری (workspace) گنبدی هستند. این رباتها معمولا برای کارهای انتقال سریع و انتخاب یا انتقال محصول استفاده می شوند. رباتهای دلتا توانایی تحمل نیروی زیادی ندارند.

ربات های قطبی یا کروی
ربات های قطبی دارای یک مفصل دورانی (revolute) هستند که بازو را به پایه متصل می کند و مفاصل بعدی به ترتیب دو اتصال چرخشی و یک مفصل خطی هستند. این نوع ربات به عنوان ربات های کروی نیز نامیده می شوند.علت این است که این رباتها یک فضای کاری کروی دارند. ساختار ربات های قطبی حجم زیادی از فضا را اشغال می کند اما دسترسی بازو در فضای کاری خود انعطافپذیری زیادی دارد.

ربات های استوانه ای
ربات های استوانه ای حداقل یک اتصال دوار در پایه و حداقل یک مفصل پریزماتیک دارند که اعضا (link) را به هم متصل می کند. این ربات ها دارای یک فضای کاری استوانه ای هستند که عضو آخر به صورت عمودی و یا کشویی حرکت می کند. بنابراین، رباتهایی با پیکربندی استوانه ای حرکت خطی عمودی و افقی را به همراه حرکت دوار در محور عمودی تولید میکنند. طراحی جمع و جور انتهای بازو به ربات اجازه می دهد تا بدون هیچ گونه اتلاف سرعت و تکرار، به محلهای مشخص درون فضای کاری خود برسد. این ربات بیشتر در کاربردهای ساده که در آن مواد جمع آوری شده، چرخانده و در محل خاصی قرار داده میشود، استفاده میشوند.

با توجه به تعریفی که از ربات صنعتی و انواع آن شده است، افراد باید نوع مناسبی از ربات را برای کسب و کار خود انتخاب کنند. تولیدکنندگان قبل از انتخاب ربات، عواملی مانند بار، جهت گیری، سرعت، دقت، تناوب زمانی هر حرکت و محیط را در نظر میگیرند که در نتیجه کارایی و سودآوری را به همراه خواهد داشت. شرکتهای پیشرو در زمینه رباتیک در حال ارائه راه حل های اتوماسیون و رباتیک برای رفع نیازهای خاص مشتریان خود هستند.
شاخصهای فنی ربات صنعتی
تعداد محور
یک محور ربات، نشان دهنده یک درجه آزادی است. برای دسترسی به هر نقطه دلخواه در صفحه، دو محو حرکتی برای ربات صنعتی لازم است و همچنین به منظور دسترسی به هر نقطه از فضا، سه محور حرکتی مورد نیاز میباشد. علاوه بر این به منظور کنترل کامل، در راستای آخرین بند بازوی ربات، سه محور حرکتی دیگر تعبیه میشود. بیشتر ربات های صنعتی بین سه تا هفت محور دارند.
توجه به تعداد محورها هنگام انتخاب یک ربات صنعتی مهم است، زیرا دامنه حرکت آن را تعیین می کند. ربات های شش محوره معمولا رایج ترین هستند، زیرا دارای سطح بالایی از انعطاف پذیری هستند که باعث می شود آنها را قادر به اجرای برنامه های پیچیده کند. برنامه های کاربردی ساده تر ممکن است به دامنه حرکت کمتری نیاز داشته باشند. به همین دلیل است که ربات چهار محوره برای انجام کارهای اولیه پالت گذاری بسیار مورد استفاده قرار می گیرد.
درجات آزادی
درجه آزادی حرکت مستقل ربات را تعیین می کند. هر چه یک ربات محورهای بیشتری داشته باشد، انعطاف پذیری یا امکان حرکت بیشتری خواهد داشت. به عبارت دیگر درجات آزادی همان تعداد محورهای تعبیه شده در ربات صنعتی میباشند.
فضای کاری
فضای کاری در واقع محدوده ای است که ربات میتواند به آن نقاط دسترسی داشته باشد. این فضا در ربات های بند بند، در قالب یک کُره است که شعاع آن، فضای کاری ربات محسوب میشود.
دسترسی
دسترسی یک ربات در واقع معیاری برای سنجش این است که بازوی رباتیک تا چه حد باز میشود؟ این عدد درسترسی در جهت های مختلف را نشان میدهد. نکته قابل توجه این است که ممکن است دسترسی در راستای یک جهت بیشتر یا کمتر ازسایر جهت ها باشد.
ظرفیت وزنی
ظرفیت وزنی در واقع حداکثر وزن قابل حمل توسط بندهای ربات است، بدون اینکه به دقت و سرعت آن لطمه وارد شود. ظرفیت وزنی ربات صنعتی معمولاً بر حسب کیلوگرم بیان می شود. ظرفیت وزنی که به آن ظرفیت بار هم گفته میشود،
در بین ربات های صنعتی بسیار متنوع بوده و از 0.5 تا بیش از 1000 کیلوگرم متغیر است. در نظر گرفتن وزن قطعات کار و همچنین وزن هر گونه ابزار نصب شده بر روی ربات به شما کمک می کند تا یک ربات با ظرفیت بار مناسب انتخاب کنید.
وزن ربات صنعتی
وزن ربات در واقع وزن بازوی آن را مشخص میکند که بر حسب کیلوگرم مشخص میشود. اگر قصد دارید ربات صنعتی خود را روی دیوار یا سقف، نصب کنید، در هنگام خرید ربات صنعتی با به وزن آن توجه داشته باشید.
سرعت
سرعت حرکت ربات صنعتی، حداکثر میزان مسافتی است که در هر ثانیه میتواند طی کند بدون اینکه به ربات فشار بیاید و یا دچار اختلال شود. سرعت با واحد متر بر ثانیه سنجیده میشود.
شتاب
حداکثر میزان شتاب قابل ارائه به هریک از محورهای ربات با در نظر گرفتن بار مشخص در کابردهایی نظیر حمل
تکرارپذیری
همانطور که میدانید از ربات های صنعتی برای کارهای تکراری مثل تولید مداوم یک محصول استفاده میشود، مقدار فاصله مسافتی که در حرکت رفت و برگشتی در یک مسیر ثابت میتواند بپیماید؛ تکرار پذیری ربات صنعتی را نشان میدهد.
دقت
اختلاف بین مختصات عددی یک نقطه مشخص شده توسط نرم ربات و مکانی که ربات به آن حرکت کرده است، میزان دقت ربات صنعتی را نشان میدهد.